Mathematical Foundations of Spatial and Temporal Subsampling: A Study on Pooling Layers
In the design of Deep Convolutional Neural Networks (CNNs), the ability to extract invariant features while controlling computational complexity is paramount. Pooling Layers serve as the mathematical mechanism for spatial and temporal subsampling. Their primary functions include dimensionality reduction, noise attenuation, and the promotion of translation invariance.
This study formalizes the mapping of input tensors to reduced feature spaces across 1D, 2D, and 3D dimensionalities.
1. Dimensionality Mapping and Algebraic Formalization
Regardless of the input dimensionality, the transformation of a tensor signal through a pooling operation is governed by the window size , stride , and padding .
General Mapping Function
For an input dimension , the output dimension is calculated as:
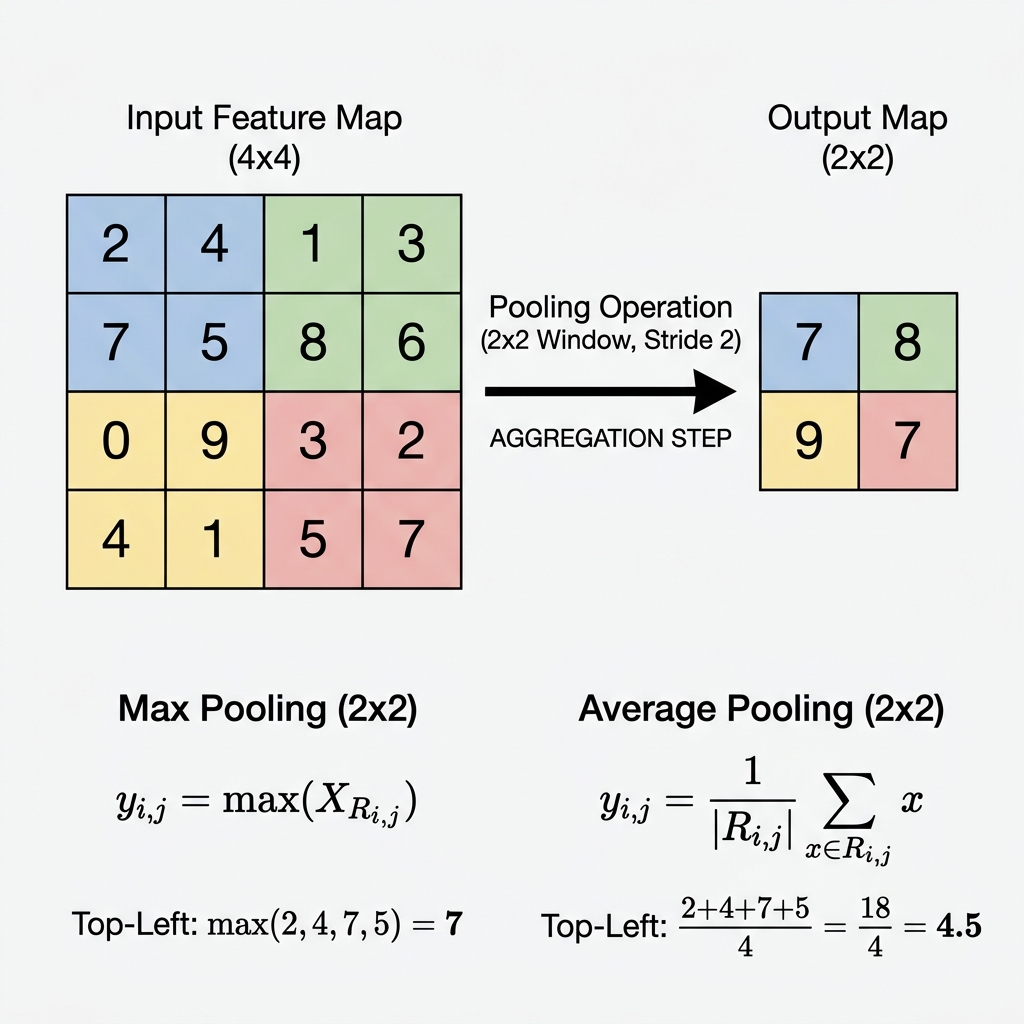
The value of an output element is determined by applying an aggregation function over a local subset of the input tensor :
Where is defined as:
- Max Pooling:
- Average Pooling:
2. Temporal Subsampling in 1D Architectures
1D Pooling is primarily utilized in sequential signal analysis (e.g., NLP, Telemetry, Audio).
1D Case Study
Consider an input sequence with a pooling window and stride .
- MaxPooling1D: Captures local maxima, preserving strong signals or "activations."
- Output:
- AveragePooling1D: Computes the local arithmetic mean, acting as a low-pass filter.
- Output:
- GlobalMaxPooling1D: Collapses the entire sequence into a single scalar representing the global maximum activation.
- Output:
3. Spatial Subsampling in 2D Architectures
2D Pooling is the standard for image processing and spatial feature map reduction.
2D Formalization
Given an input matrix , the output is a spatially reduced projection.
Scientific Utility: Max pooling is particularly effective for preserving sharp discontinuities such as edges and texture gradients, which are critical for object recognition tasks.
4. Volumetric and Spatiotemporal Reduction (3D)
3D Pooling extends the aggregation cube into the volumetric domain, essential for medical imaging (voxels) and video analysis (spatiotemporal blocks).
- Medical Scanning: Reduction of MRI/CT volumes while preserving structural anomalies.
- Action Recognition: Temporal pooling across frames to capture motion invariants while reducing frame-rate dependency.
5. Comparative Performance Metrics
| Metric | Max Pooling | Average Pooling | Global Pooling |
|---|---|---|---|
| Feature Extraction | Sharp / Extreme signals | Smooth / General trends | Global invariants |
| Noise Sensitivity | Sensitive to outliers | Robust / Gaussian smoothing | Highly robust |
| Invariance | Local translation | Local smoothing | Total spatial invariance |
| Output Shape | Reduced Grid | Reduced Grid | Vector |
[!TIP] Key Takeaway: Max Pooling is the default for feature extraction in hidden layers, whereas Average/Global Pooling is frequently utilized at the "neck" of the architecture to transition into fully connected classification heads, effectively acting as regularizers against overfitting.